シミュレーションで学ぶ自動制御技術入門
目次
対応OS
Windows2000 Professional
Windows XP (32Bit版)
Windows Vista (32Bit版)(*1)
Windows 7 (32Bit版)(*1)
Windows 10 (*1)
注:OSとブラウザのバージョンによりヘルプポインターのジャンプ機能が使えない場合があります。
*1:ハードコピー機能は使用できません。
CPU
Pentium IIIプロセッサ800MHz相当以上推奨
IIIプロセッサ800MHz相当以上推奨
注: MMX Pentiumプロセッサ266MHzでも動作は可能ですが、演算速度が遅くなるため、指定した時間でシミュレーションが実行できない場合があります。
メモリ
RAM 128MB以上
ハードディスク
30MB以上の空き
グラフィック
1024×768 ドット以上
High Color(16ビット)以上
2.1 ビットマップ表示プログラムの関連つけ。
このシミュレーションプログラムには、画面のハードコピーをとる機能があります。画面のハードコピーはビットマップファイルとして保存されます。
保存したビットマップ画像は、「Wlindowsのプログラムの関連付け」機能で、拡張子BMPを「Microsoft Paint」または「イメージング」に設定しておくと、プログラムのツールバーから直接表示させることが出来ます。
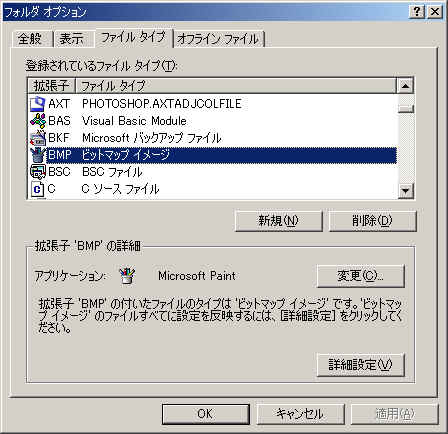
「ビットマップ表示プログラムの関連づけ」を変更する場合は、以下の手順で行ってください。
「エクスプローラ」→「ツール」→「フォルダオプション」で以下の画面が表示されます。「変更」で関連づけするプログラムを指定します。
2.2 通常使うプリンタの設定
このシミュレーションプログラムには、画面のハードコピーをとりプリンタに印刷する機能があります。「通常使うプリンタ」に設定されているプリンタに印刷されるので、印刷を行う場合はこの設定を行ってください。
シミュレーションプログラムのインストールが完了すると以下のようにスタートプログラムに追加されます。

シミュレーションで学ぶ自動制御技術入門をクリックするとプログラムが起動します。
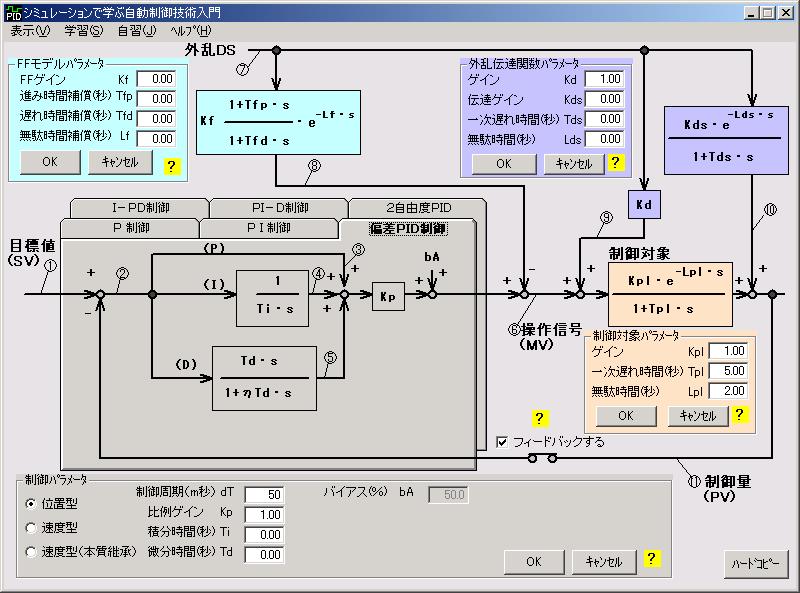
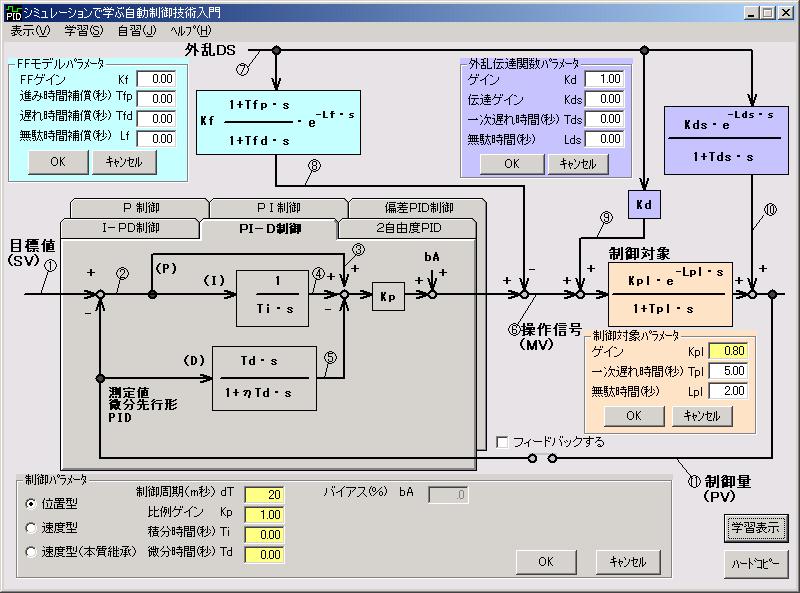
シミュレーションプログラムを起動すると以下のようなメイン画面が表示されます。
この画面は、シミュレーターのブロックダイアグラムを表示すると共に演算に使用するパラメータを表示・設定する画面です。またコントローラパネルの呼び出しなどを行うメニュー画面となります。
ヘルプポインター をクリックすると、該当部分のヘルプが表示されます。 また このヘルプポインターは、メニューバーより表示・非表示の切り替えが出来ます。
をクリックすると、該当部分のヘルプが表示されます。 また このヘルプポインターは、メニューバーより表示・非表示の切り替えが出来ます。
(注:OSとブラウザのバージョンによりヘルプポインターのジャンプ機能が使えない場合があります。)
4.1 メニューバー
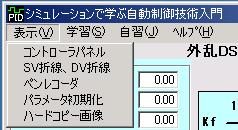
シミュレーションプログラム画面上部には、以下のようなメニューバーがあります。

それぞれのタイトルをマウスクリックするか、Altキーとタイトル右のアルファベットをキー入力することで以下のようなメニューが表示されます。
コントローラパネル: コントローラパネルを表示します。
SV折線、DV折線: SV折線、DV折線設定画面を表示します。
ペンレコーダ: ペンレコーダ画面を表示します。
パラメータ初期化: パラメータをデフォルト値に初期化します。
ハードコピー画像: ハードコピーしたビットマップファイルの選択画面を表示します。
本文テキストに対応した学習シミュレーションが行えます。
詳細は、9.学習機能の操作説明 をご覧ください。
自分で試したシミュレーションをプロジェクトとして保存する機能です。
プロジェクトの目的やコメントを任意に入力できるほか、デフォルト値から変更したパラメータ値を記憶しますので、後から何度でもシミュレーションを再現することができます。
詳細は、10.自習機能の操作説明 をご覧ください。
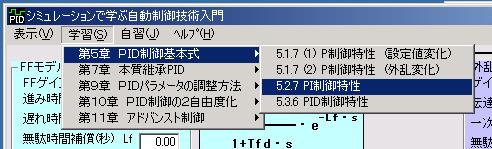
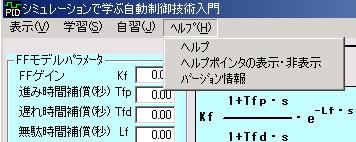
ヘルプ: このドキュメントを表示します。
ヘルプポインタの表示・非表示: ヘルプポインター の表示・非表示を切り替えられます。
ヘルプポインタを押せば、該当のヘルプ画面にジャンプします。
(ご注意)OSによりジャンプしない場合は、下図のようにアドレスの最後にカーソルを移動しEnterキーを押せばジャンプします。

バージョン情報:バージョン情報画面を表示します。
このシミュレーションは、制御タイプのタブを選択することにより6種類の制御タイプを選択できます。
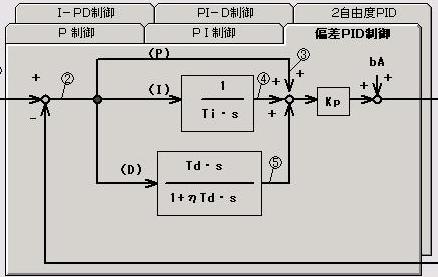
それぞれの「制御タイプ」の違いについては、本文の以下の項目をご覧ください。
6.5 偏差PID制御から実用形態への工夫
チェックマークをはずすと、フィードバック制御を行わずオープンループとすることができます。
操作出力をマニュアルモードで変化させて、制御対象の応答だけを見る場合などに使用します。
制御パラメータは、以下のものがあります。(制御タイプにより設定できないものは表示されません。)

4.4.1 位置型/速度型/速度型(本質継承)
オプションボタンにより位置型/速度型/速度型(本質継承)のいずれかの演算方法を選択できます。
それぞれの違いについては、本文の以下の項目をご覧ください。
7.2.2 位置型演算と速度型演算
7.3 本質継承・速度型ディジタルPID制御演算方式
4.4.2 制御パラメータ・制限パラメータ・目標値フィルタ
テキストボックスに数値を入力し、「OK」ボタンを押すと設定範囲をチェックして値が反映されます。「キャンセル」を押すと入力前のデータに戻ります。
それぞれの項目の説明は以下のとおりです。
制御パラメータ グループ
制御周期(m秒)dT
(設定範囲: 20 〜 2000)
制御演算を行う周期を設定します。
CPUの能力により指定の周期で演算が完了しない場合もあります。この場合実際の時間よりも時間が余計にかかりますがグラフの表示の形には問題はありません。
比例ゲイン Kp
(設定範囲: 0.00 〜 10.00)
制御演算の比例ゲインを設定します。
積分時間(秒) Ti
(設定範囲: 0.00 〜 60.00)
制御演算の積分時間を設定します。
微分時間(秒) Td
(設定範囲: 0.00 〜 10.00)
制御演算の微分時間を設定します。
バイアス(%) ba
位置型演算を行う時のバイアス値を表示します。値は自動的に演算され設定することはできません。
制限パラメータ グループ
MV上限(%) MH
(設定範囲: 0 〜 100)
速度型/速度型(本質継承)の場合の操作信号MVの上限値を設定します。
MV下限(%) ML
(設定範囲: 0 〜 100)
速度型/速度型(本質継承)の場合の操作信号MVの下限値を設定します。
MV変化率リミット(%/dT) dML
(設定範囲: 0 〜 100)
速度型/速度型(本質継承)の場合の制御周期ごとの操作信号MVの変化率制限値を設定します。
目標値フィルタ グループ
目標値フィルタ α
(設定範囲: 0.00 〜 1.00)
2自由度PIDの目標値フィルタ αを設定します。
目標値フィルタ β
(設定範囲: 1.00 〜 2.00)
2自由度PIDの目標値フィルタ βを設定します。
目標値フィルタ γ
(設定範囲: 0.00 〜 2.00)
2自由度PIDの目標値フィルタ γを設定します。
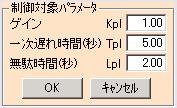
制御対象の特性を設定するパラメータです。
制御対象ゲイン Kpl (設定範囲: 0.01 〜 10.00)
制御対象一次遅れ(秒) Tpl
(設定範囲: 0.00 〜 60.00)
制御対象無駄時間(秒) Lpl
(設定範囲: 0 〜 200 ×dT[m秒]/1000 )
dT :制御周期[m秒]
テキストボックスに数値を入力し、「OK」ボタンを押すと設定範囲をチェックして値が反映されます。「キャンセル」を押すと入力前のデータに戻ります。
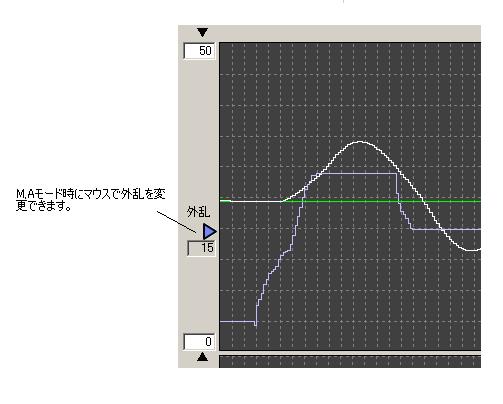
外乱の特性を設定するパラメータです。Kd
は、制御対象の前に外乱が入る場合のゲインです。それ以外は、制御対象の後に外乱が入る場合のパラメータです。
ゲイン Kd (設定範囲: 0.00 〜 10.00)
伝達ゲイン Kds (設定範囲: 0.00 〜 10.00)
一次遅れ時間(秒) Tds
(設定範囲: 0.00 〜 60.00)
無駄時間(秒) Lds
(設定範囲: 0 〜 200 ×dT[m秒]/1000 )
dT :制御周期[m秒]
テキストボックスに数値を入力し、「OK」ボタンを押すと設定範囲をチェックして値が反映されます。「キャンセル」を押すと入力前のデータに戻ります。


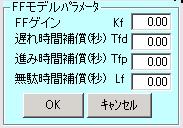
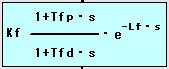
フィードフォワードの特性を設定するパラメータです。
FFゲイン Kf (設定範囲: 0.00 〜 10.00)
遅れ時間補償(秒) Tfd
(設定範囲: 0.00 〜 60.00)
進み時間補償(秒) Tfp
(設定範囲: 0.00 〜 60.00)
無駄時間補償(秒) Lf
(設定範囲: 0 〜 200 ×dT[m秒]/1000 )
dT :制御周期[m秒]
テキストボックスに数値を入力し、「OK」ボタンを押すと設定範囲をチェックして値が反映されます。「キャンセル」を押すと入力前のデータに戻ります。
4.8 ハードコピー
現在の画面をコピーし、ビットマップファイルを作ります。
注:Windows Vista ,Windows 7,Windows 10 ではハードコピー機能は使用できません。

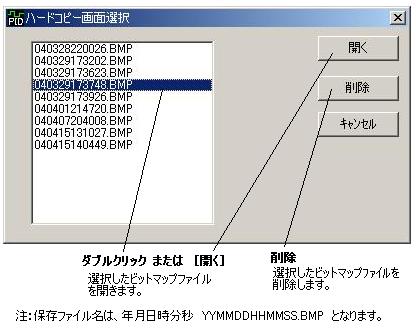
保存ファイル名は、年月日時分秒 YYMMDDHHMMSS.BMP となります。
Windowsの「通常使うプリンタ」に対して印刷することもできます。
コントローラパネル 呼出操作で以下のような画面が表示されます。
この画面は、4隅のいずれかをマウスドラッグすることで画面のサイズを変えることができます。
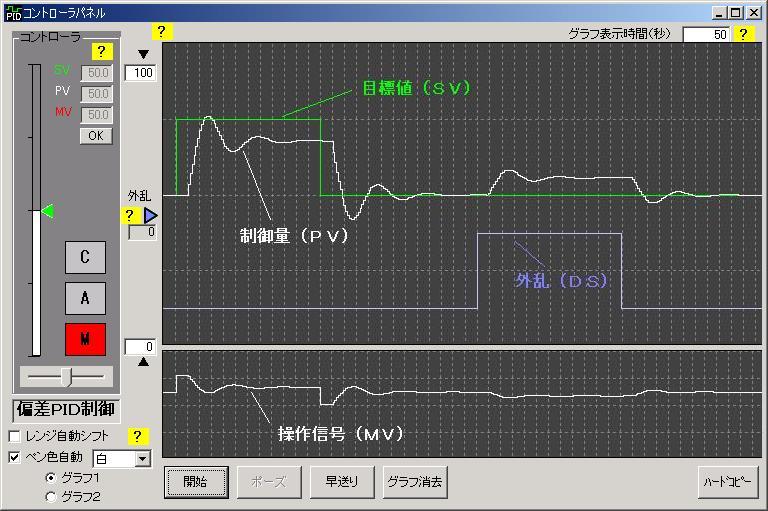
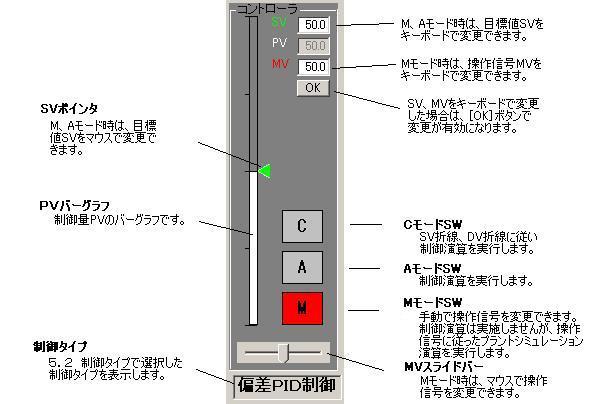
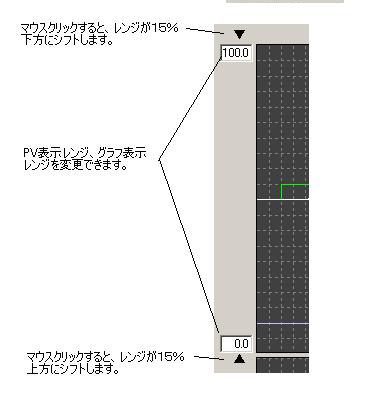
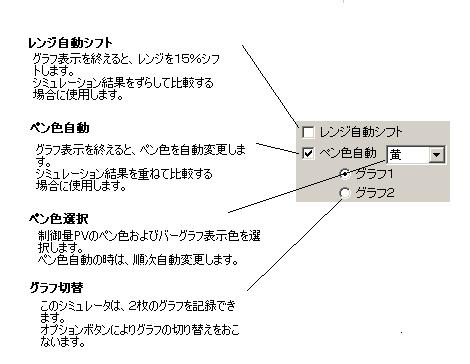
グラフの表示レンジを設定します。
上限レンジ (%)
RH
(設定範囲: -100.0 〜 100.00 ただし RL<RH)
下限レンジ (%)
RH
(設定範囲: -100.0 〜 100.00 )
グラフの表示時間を設定します。
グラフ表示時間 (秒) TM
(設定範囲: 10 〜 300)
ご注意:
早送り中は、グラフの再描画(AutoRedraw)を行わないので、コントローラパネル画面が他の画面と重なるとグラフの一部が消えることがあります。
現在の画面をコピーし、ビットマップファイルを作ります。
注:Windows Vista ,Windows 7,Windows 10 ではハードコピー機能は使用できません。
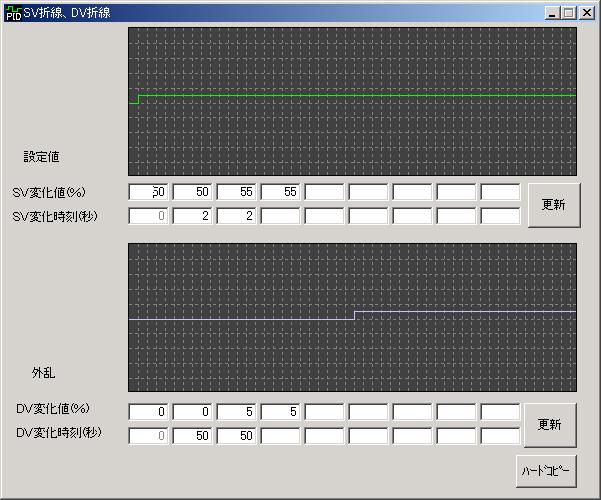
SV折線、DV折線 呼出操作で以下のような画面が表示されます。
折線は、9ポイント8折線まで登録できます。データをブランクとするとブランク直前の値が、最後まで設定されたものとみなします。データ変更後は、[更新]ボタンを押すと値が反映されます。なお縦軸、横軸の表示レンジは、コントローラパネルで設定した値となります。
6.1 ランプ状の設定方法
設定ポイントを直線で結ぶので、以下のような設定を行うとランプ(傾斜)状の設定が可能です。

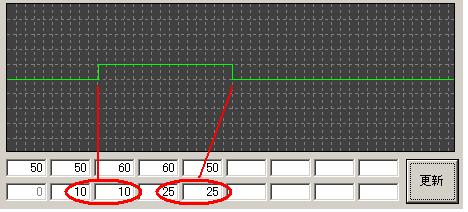
6.2 ステップ状の設定方法
ステップ上の変化をさせる場合は、同じ時刻にしてステップ変化させたい値を設定します。
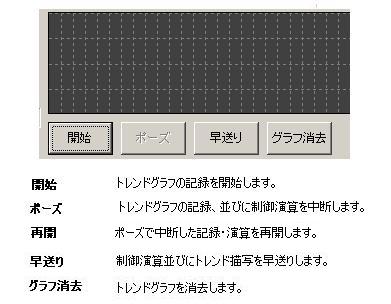
ペンレコーダ 呼出操作で以下のような画面が表示されます。
この画面は、4隅のいずれかをマウスドラッグすることで画面のサイズを変えることができます。
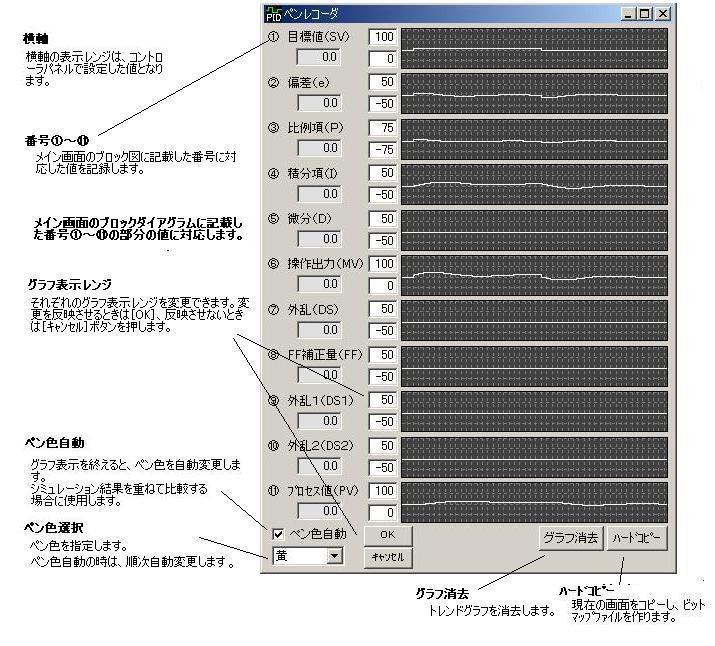
注:Windows Vista ,Windows 7,Windows 10 ではハードコピー機能は使用できません。
ハードコピー画像 呼出操作で以下のような画面が表示されます。
注:Windows Vista ,Windows 7,Windows 10 ではハードコピー機能は使用できません。
ヒント
学習機能では、処理が完了するとビープ音が鳴り、次に操作すべきボタンが、自動的にアクティブポイントになります。
このため、ビープ音 が鳴るタイミングで Entetrキー を操作すると次々と学習を進めることができます。
また、「学習機能」画面右下の最大表示をチェックしておくとコントローラ画面が最大表示されます。
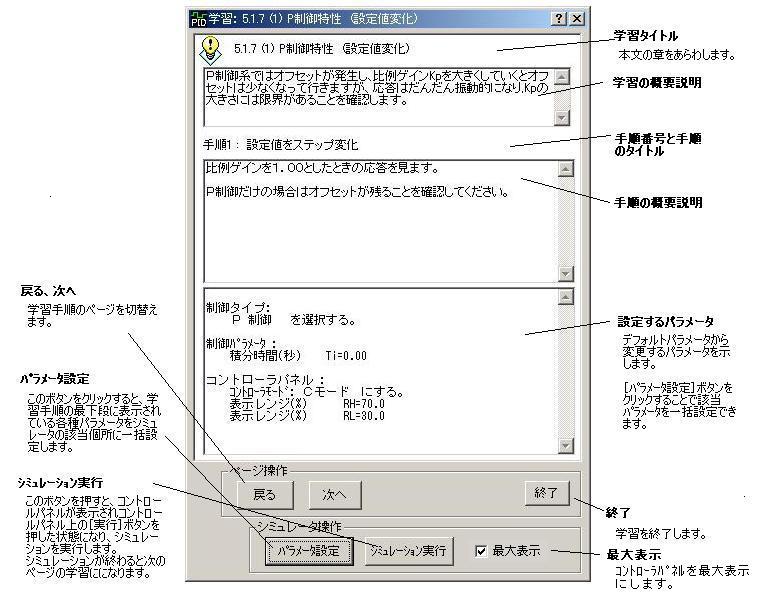
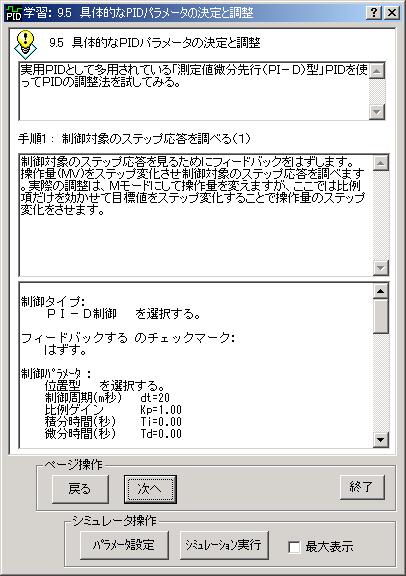
9.1 学習機能画面の説明
学習機能の 呼出操作で以下のような画面が表示されます。
9.2 学習機能の使い方
「学習機能」画面を呼び出した直後は、[パラメータ設定]ボタンがアクティブポイントになっています。
表示されている学習内容(目的、手順、設定パラメータ)を確認し、[パラメータ設定]ボタンを押すと、画面に表示されているパラメータが自動的に設定されメイン画面が表示されます。
自動設定されたパラメータが、黄色で表示されますので、変更箇所を確認し、[学習表示]ボタンを押すと、変更パラメータが有効になり「学習機能画面」に戻ります。
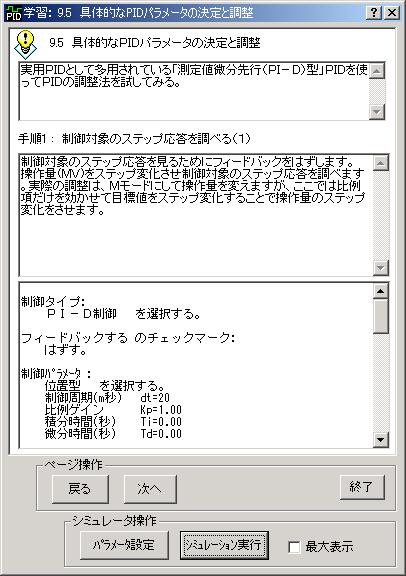
[シミュレーション実行]ボタンを押すと、「コントローラ画面」が表示されシミュレーションが実行されます。
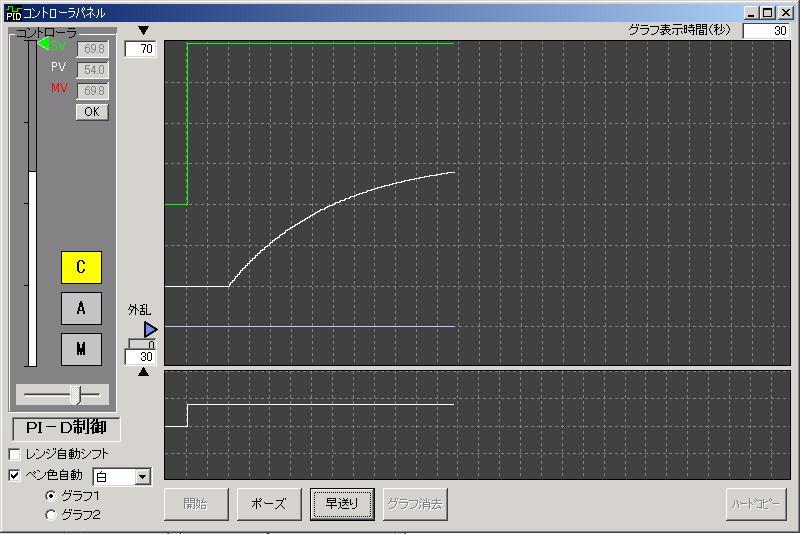
シミュレーションは、実時間(グラフ表示時間が30秒ならば、30秒で終了)で実行されますが、[早送り]ボタンを押すと高速処理が可能です。シミュレーションが終わると画面右下に[学習表示]ボタンが現れます。
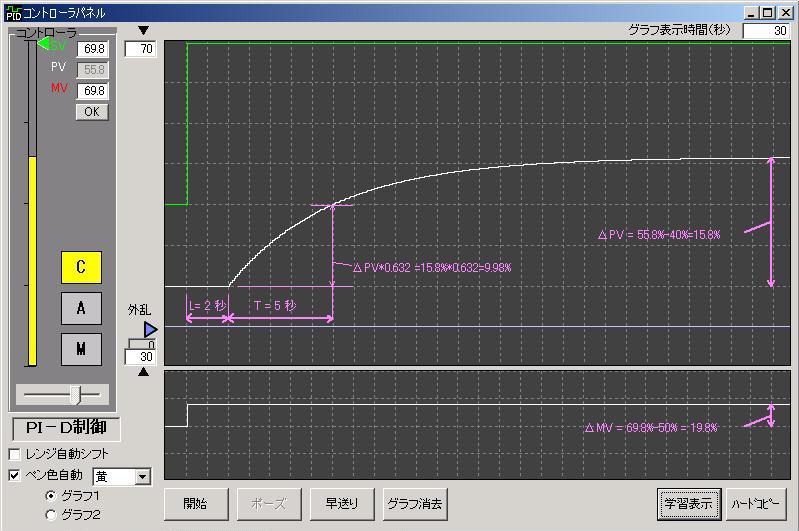
[学習表示]ボタンを押すと、「学習機能画面」に戻り、[次へ]ボタンがアクティブポイントになっています。
実行した学習内容を再度確認し、[次へ]ボタンを押すと、次の学習内容が表示され上記手順が繰り返されます。
学習の最後まで終わると、学習で設定したパラメータを初期値に戻すかどうかの確認メッセージを表示します。
今のパラメータを残したまま、自分なりに動かしたい場合は、「いいえ」を選択し、それ以外は「はい」を選択します。「はい」を選択した場合は、起動時の初期パラメータに戻ります。
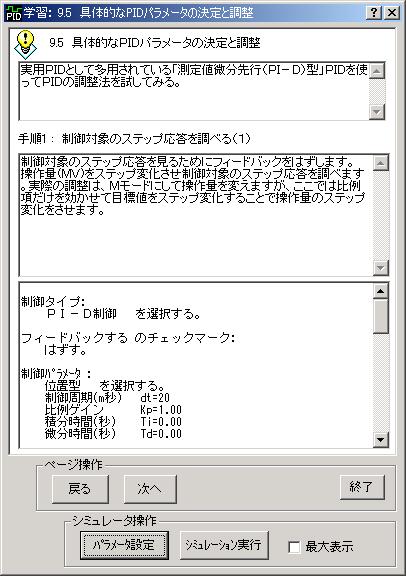
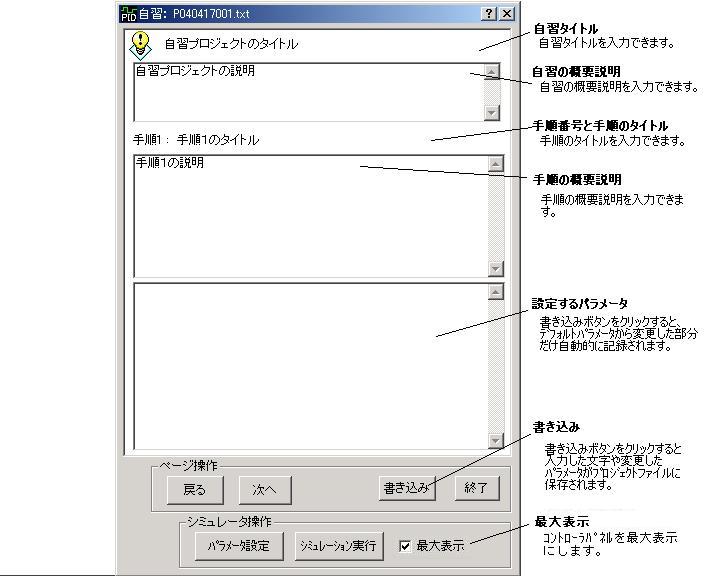
自分で試したシミュレーションをプロジェクトとして保存し、後でそのときのシミュレーションを再現させる機能です。
プロジェクトの目的やコメントを任意に入力できるほか、デフォルト値から変更したパラメータ値を記憶しますので、後から何度でもシミュレーションを再現することができます。
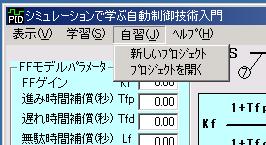
10.1 新しいプロジェクト
以下のようにメニューバーから[新しいプロジェクト]を選ぶとプロジェクトを保存するファイル名が表示されます。デフォルトのファイル名は、P年月日連番 PYYMMDD***.txt となります。このファイル名は任意に変更することができます。
[OK]をクリックすると10.3の自習プロジェクト登録・実行画面が表示されます。
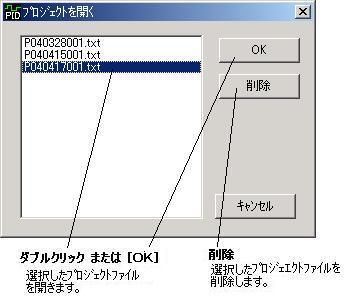
10.2 プロジェクトを開く
以下のようにメニューバーから[プロジェクトを開く]を選ぶとプロジェクトを保存しているファイル名の選択ダイアログが表示されます。
[OK]をクリックすると10.3の自習プロジェクト登録・実行画面が表示されます。
この画面は、10.学習機能の操作説明 で示した実行機能のほかに、プロジェクトの目的やコメントを任意に入力できるほか、デフォルト値から変更したパラメータ値を登録することができます。
***********************************************************************************
ご注意
本CD-ROMに収録したプログラムやデータなどは著作権法により保護されており、特別の表記がない限り、貸与または改変、複写複製(コピー)することはできません。また、収録したプログラムやデータなどを利用することにより発生した損害などに関して、CQ出版社および著作権者は責任を負いかねますのでご了承ください。
***********************************************************************************