|
都市災害時のがれき撤去や救助での活躍を目指して!
|
震災をきっかけに誕生したロボコンに毎年参加
「レスキューロボットコンテスト(レスコン)」は,都市災害での救助活動を題材としたロボコンです(写真1).阪神・淡路大震災をきっかけに,2000年から毎年夏に神戸で開催されています.地震で倒壊した街を模した1/6スケールのフィールドを舞台に,カメラ画像を頼りにロボットを遠隔操作して,ダミヤン(被災者を模した人形)の救助活動を行います(写真2).
|
|
|
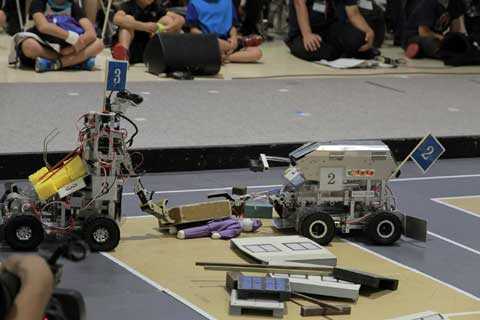

チーム「六甲おろし」は,神戸大学の学部3年生までが中心となり,レスコン出場に向けて活動しています.レスコンには2004年から毎年参加していますが,2016年の大会(第16回)で「ベストロボット賞」と「ベストプレゼンテーション賞」を受賞しました.
受賞の決め手はユーザを意識した高い操作性
ベストロボット賞を受賞した「Rectangle」(写真3)は,ダミヤン救助・がれき除去用の作業アームを直感的に操縦できるマスタ-スレーブ方式で実現したことが評価されました.

写真3 操作性にこだわった救助ロボット「Rectangle」
マスタ機(写真4)の設計にあたっては,操縦しやすさ(握りやすさ,動かしやすさ)と保持性(手を離したときに関節が勝手に動かないこと)の両立に苦労し,試行錯誤を繰り返しました.
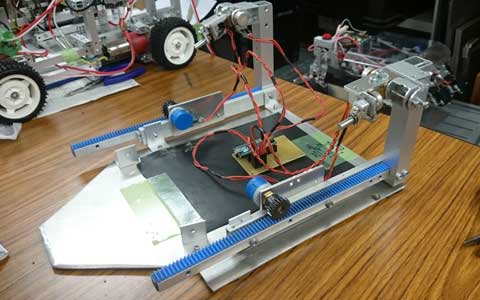
写真4 操作性にこだわった救助ロボット「Rectangle」
後輩への技術継承のために構造から見直した
これまで使っていた制御システムは,ロボットと操縦者が1対1で通信していました[図1(a),写真5(a)].これを通信規格WebSocketを用いて,Webサービスとして配信するように作り直しました[図1(b)].新しいシステムでは,操縦者が複数のロボットのカメラ画像を同時にモニタできるようになりました[写真5(b)].
(a)ビフォー (b)アフタ
図1 ロボットと操縦者のやりとりのようす(模式図)

(a)ビフォー:担当するロボットのカメラ画像だけをモニタ

(b)アフタ:複数のロボットのカメラ画像をモニタ
写真5 ロボット操縦用画面
(b)の左上に表示されているのは,競技エリアのマップである.
リーダーの持つタブレットのお絵描きアプリと同期されている
また,ロボットごとにばらばらだった足回りユニットを共通化して,ロボット製作を効率化しました(図2).
(a)ビフォー:機体ごとに構造がバラバラ(第15回)
(b)アフタ:足回りを共通ユニットとした(第16回)
図2 ロボットの足回りを共通化した
フレームも同じ材料(角パイプ)を使用して効率化した
ロボットを動かす基盤となるシステムの作り直しは,危険も伴います.実は予選のとき,一部のロボットで不具合が発生しました.本選ではなんとか修正できたのですが,まだまだ細かい部分では改善の余地があります.完成度を上げ,高度な救助活動につなげていきたいです.

写真6 第16回大会に出場したチーム「六甲おろし」
(写真提供:レスキューロボットコンテスト実行委員会)