1年間で回路,アプリ,機構すべてを作り上げる!
専門学校HAL東京の就職作品プレゼンテーションに行ってきました
2013年2月7日〜8日に,HAL東京(東京都新宿区)において「就職作品プレゼンテーション」が行われました.http://www.hal.ac.jp/tokyo/mind/works/index.html#/presentation/robot
本イベントは大阪,名古屋の同校学生も集まって展示していました.
会場では企業の方が学生さんのプレゼンテーションを聞いたり,作品を見たりとにぎわっていました.編集部は先端ロボット開発学科を見学してきました.
自分の欲しい腕時計を見つける「とけさが」
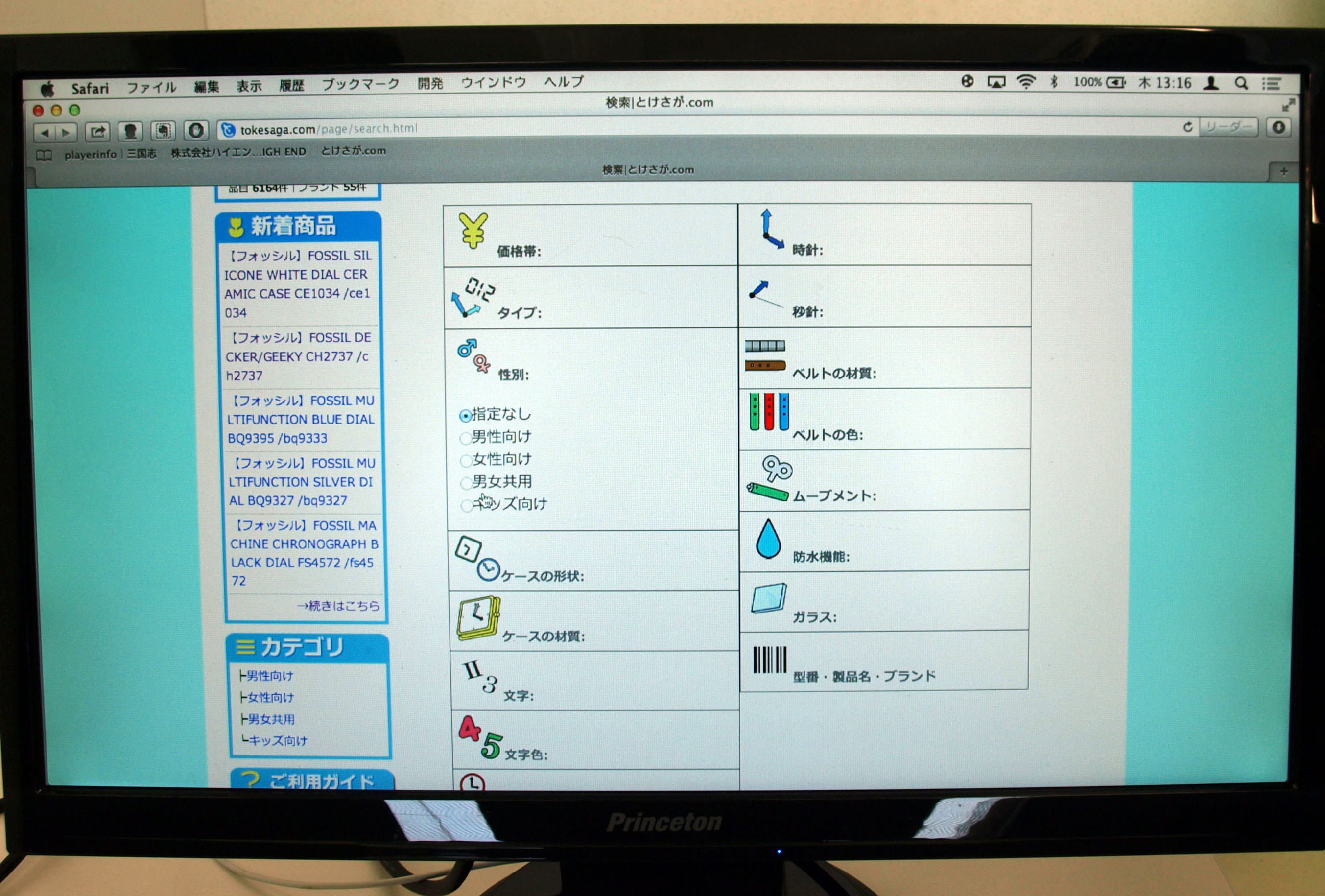
岩井 貴也さん(写真1右)と土屋 宏樹さん(写真1左)は,広告代理店株式会社ハイエンド(http://highend-music.com/)とタッグを組んで製作した腕時計検索サイト「とけさが.com」http://tokesaga.com/を発表しました(写真2).
ベルトの色や文字の種類,文字の色,ガラスの素材,ケースの素材,秒針など細かい条件で検索でき,条件にあった腕時計が見つかると販売サイトのリンクに飛ぶことができます.
岩井さんは独学でPHPやHTMLを学び,本Webサイトを作りました.
土屋さんは企画と総括を担当しました.
すでに5,000万ビューをこえているそうです.
|
写真1 とけさが.comを製作した岩井 貴也さん(右)と土屋 宏樹さん(左) |
写真2 とけさが.comの条件を指定しているところ |

トラ技ジュニアの元気っこの驚くべき作品
花之枝 あづみさん(写真3)は,手のひらをカメラにかざすと静脈の可視化や個人識別ができる「パーソナルバイオメトリクス認証システム」(写真4)を展示しました.画像化された静脈情報はメールで送ることができます.
|
写真3 トラ技ジュニアの元気っこにも登場した花之枝 あづみさん |
写真4 手のひらをカメラにかざすと静脈が可視化される「パーソナルバイオメトリクス認証システム」 |


2枚の写真をフュージョンして可視化するツール
照山 明愛さんは(写真5),ふつうに撮影した写真データと,近赤外線フィルタを使って撮影した写真データを組み合わせることによって,見えづらい木陰やみずたまりを見えやすくできるツールを製作しました(写真6).
ツールはC#で開発し,ハードはCCDカメラ1台を使って,可視光線(380〜750nm)カットフィルタのみを付けた場合と,近赤外線(700〜1000nm)カットフィルタのみを付けた場合で撮影して,合成するそうです.
|
写真5 2枚の写真を合成して見えづらい写真を見えやすくするツールを作った照山 明愛さん |
写真6 左側がツールを使う前の写真,右側がツールを使った後の写真(水たまりが見えやすくなっている) |


物理現象が楽しく学べるアプリ
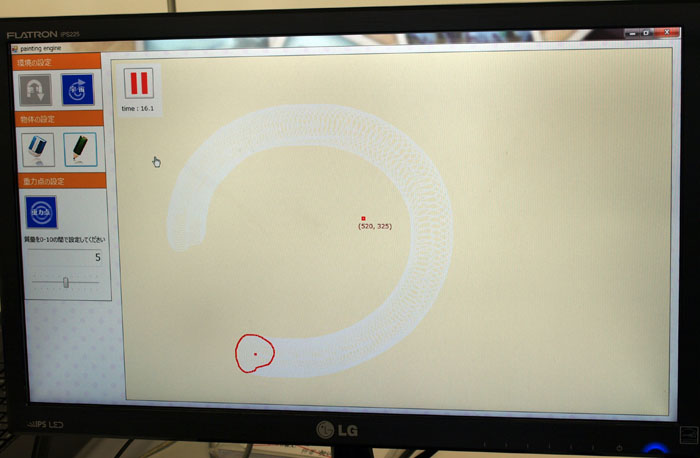
伊藤 美渚子さんは(写真7),地球上もしくは宇宙上での物体の運動をシミュレートできるアプリケーション・ソフトウェアを製作しました.
画面上に操作者が自由に決められる○(丸)を書き,タブレットでその○を引っ張ってどう動くのかをシミュレートできます(写真8).
C++で開発し,MATLABで検証をしたそうです.同アプリは中学生を想定して,学校で楽しく物理を学べるようにとの想いから作ったそうです.
今後は,物体が回転したり,バウンドしたりできるようにすると教えてくれました.
|
写真7 物理現象が楽しく学べるアプリを製作した伊藤 美渚子さん(トラ技ジュニアの元気っこにも登場した) |
写真8 ○を書いて引っ張ると物理法則をシミュレートができる |
Webカメラを使って色を認識して追尾する
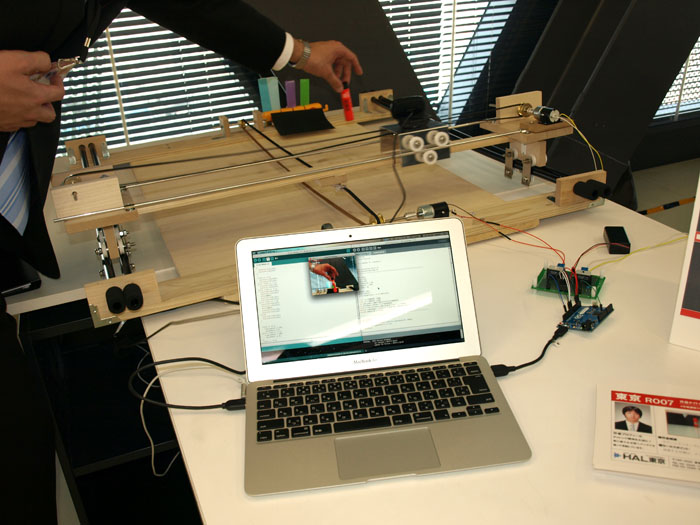
鈴木 真延さんは(写真9),カメラからパソコン上に取り込まれた動画をクリックし,指定した(クリックした)色を追尾してモータが動く装置を製作しました(写真10).
Webカメラで写した画像上で追尾したい色をクリックすると、その色とその周辺を画像処理して追尾するそうです.
Arduino Leonardoを使ってモータを2個動作させていました.
|
写真9 特定の色を追尾する装置を製作した鈴木 真延さん |
写真10 色を追尾してモータが動く装置 |

近未来的なコミュニケーション・ロボット
関 宥哉さん(写真11左)と加藤 滉平さん(写真11右)は,人の声を認識して動作するコミュニケーション・ロボットを製作しました(写真12).
「こんにちは」や「お手」,「ばんざい」といった言葉を認識してモータを動かしたり手を挙げたり,さらにLEDが光ったりします.XBeeでArduino Leonardoと通信しています.
ソフト開発は仮想Linux環境を使ったそうです.
ロボットの外観はだれにでも受け入れられやすい卵形にして,目は瞬きするアプリケーションを作り愛嬌を取り入れました.
|
写真11 近未来的なコミュニケーション・ロボットを製作した関 宥哉さん(左)と加藤 滉平さん(右) |
写真12 「こんにちは」や「お手」などの言葉を認識してモータを動かし手を挙げるロボット |


自分と握手やジャンケンができる手
櫻井 將貴さんは(写真13),「データグローブを用いたマスタ・スレーブマニピュレータ」というテーマで,自分の手の動きを読み取るグローブと,無線通信で遠隔連動するマニピュレータを製作しました(写真14).
医療や介護ロボットなどを目標にしたそうです.
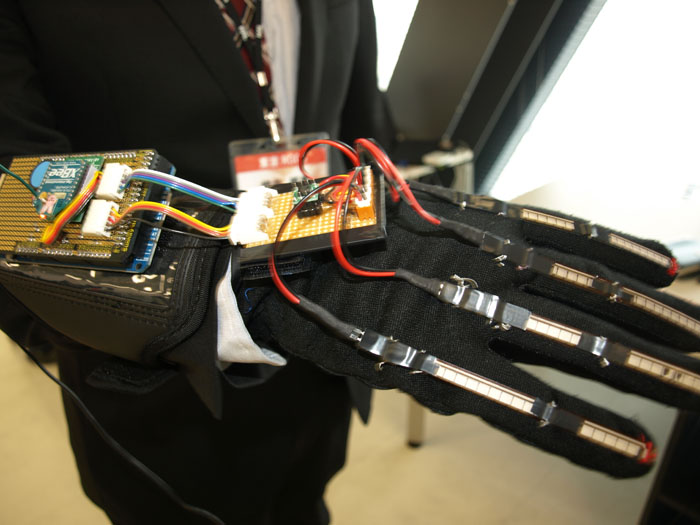
グローブに加速度センサや曲げセンサ,XBeeなどを搭載し,手にはめて指を曲げると,離れたもう一つの手に搭載されているモータが連動して駆動,手が動いて見えるというものです.
全部の指を同時に動かす時は親指から順番に信号を送っています.
今後はインターネットとつなげて,世界中で通信できるようにしたいとのことでした.
グローブにはArduino MEGA,離れた手にはArduino Unoを使っていました.
|
写真13 自分と握手やジャンケンができる手を製作した櫻井 將貴さんと手 |
写真14 グローブには各センサやXBeeモジュールなどが搭載されている |
どこでも走るカメラ付きミニ戦車「探査型クローラロボット」
比留間 彰さんは(写真15),戦車のようなキャタピラで走るカメラ付き移動ロボット「探査型クローラロボット」を製作しました(写真16).
地磁気センサ,加速度センサ,Wi-Fiカメラ,バッテリなどを搭載しています.
動作電圧は7.4V.本体とパソコンの通信はZigBee,カメラとパソコンの通信はWi-Fiに分け,フレーム・レートが落ちないようにしました.
動画はスマートフォンでも表示できます.ロボットが段差で傾くと,パソコン上の表示も傾きます.
|
写真15 どこでも走るカメラ付きミニ戦車「探査型クローラロボット」を製作した比留間 彰さん |
写真16 段差もらくらく乗り越えられる.キャタピラは全部で64個,1個30分かけて作った.パソコン上のインターフェースがシンプルでかっこいい |

宙をふわふわ泳ぐ「フィッシュ・ロボット・バルーン」
小林 瑛さんは(写真17),尾びれを動かして方向転換するマグロ型バルーン・ロボット「フィッシュ・ロボット・バルーン」を製作しました(写真18).
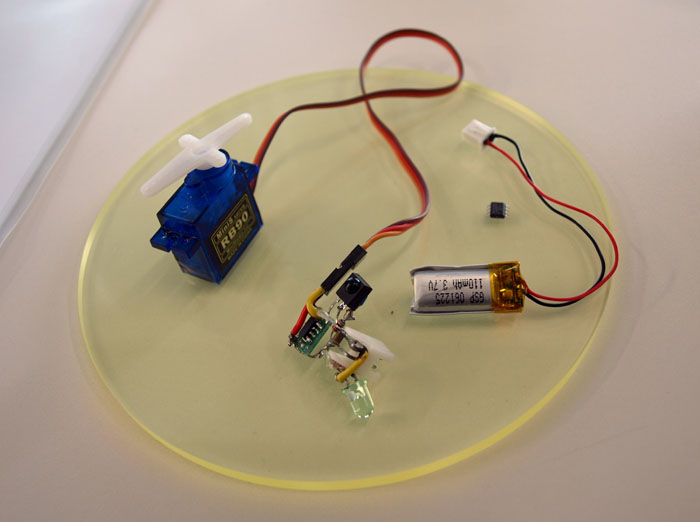
電子部品はPICマイコン,赤外線LED,抵抗,LED,バッテリ,サーボモータなどを搭載しています.
プログラムはアセンブラ言語で書いたそうです.リモコンで操作し,最大で8m離れていても大丈夫だそうです.駆動電圧は3.7Vとのこと.
|
写真17 宙を泳ぐ「フィッシュ・ロボット・バルーン」を製作した小林 瑛さん |
写真18 少ない電子部品を搭載して飛んでいる |

(取材:トラ技ジュニア編集部)