
 |
| 梅田 信弘氏
安川電機 技術開発本部 技術企画グループ |
――安川電機では,どのような機器・製品の開発にMATLABを適用してきましたか?
梅田氏:最初の導入の目的は,他のメーカや大学の研究室と同じように,モータなどの制御アルゴリズムを開発するためでした.10数年前にMATLABを導入し,モータの振動を抑えるための制御方法(軸ごとの制御の最適化)の検討などに利用していました.
メカトロニクス機器の性能を引き出し,要求に合ったシステムを作り上げるには,その特性を忠実に再現できるシミュレーション環境が必要となります.ちなみに,今ではメカトロニクスというのは一般的に使用されていますが,もともと1972年に登録された安川電機の商標で,メカと電気制御を融合させて,良い製品を作ろうという思想の表れです.
その後,2000年代に入ってMATLABを(モデリング・ツールとしてではなく)設計ツールとして利用する方向へ舵を切りました.2004年ころから徐々にその成果が現れてきています.
――2008年12月に開催されるサイバネットシステム主催のMATLAB Expoで,「メカトロ機器開発における連成シミュレーション」というテーマで講演されますが,連成シミュレーションとはいったい何ですか?
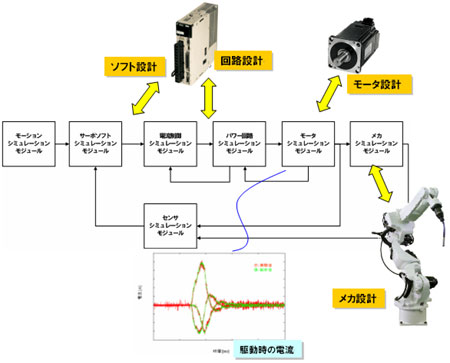
梅田氏:例えば,ここに制御の(振る舞いを表現するシミュレーション)モデル,機械のモデル,電気のモデルがあったとします.これらを一つのシミュレータ上で計算処理するのではなく,制御のシミュレータ,機械のシミュレータ,電気のシミュレータの三つをつなぎ合わせてそれぞれを連携動作させながら計算処理する,というイメージです(図1).単に,ツール間でデータの受け渡しを行っているわけではありません.
制御のシミュレーションの中には,機械をコントロールするための制御,モータをコントロールするための制御,その先のパワー・ドライブを駆動するための制御があります.同じように電気のシミュレーションには,パワー・ドライブの回路もあれば,モータの回路もあります.開発は細分化されており,担当者がそれぞれ異なります.そして,開発担当者の区分が,シミュレータもしくはシミュレーション・モデルの区分に相当します.
 |
