――MATLABを利用して,どのように連成シミュレーションを実現しているのですか?
 |
||||||||||
|
|
|
|
メカトロ機器の信頼性向上に有効な
連成シミュレーション,MATLABを中核に実現
――安川電機 技術開発本部 技術企画グループ
デジタルプロトタイピング推進チーム 梅田 信弘氏 |
|
|
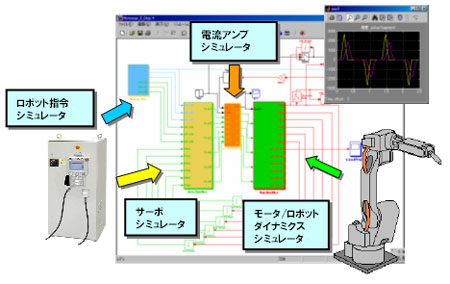
梅田氏:すべてのモデルがMATLAB上で動作しているわけではありません.共通部分の環境としてMATLABを使用していますが,設計の個々の部分については,使用するシミュレータを入れ替えています.このようなシミュレータには,自社で作成したプログラムもありますし,市販シミュレータもあります. 市販シミュレータについては,MATLABがいろいろなツールとのインターフェースを用意しています.例えば,回路シミュレーションにはサイバネットシステムが取り扱っているOrCAD PSpiceを,モータまわりの電磁界解析には日本総研ソリューションズのJMAGを主に利用しています. シミュレータを内製しているのは,制御ソフトウェアの部分です.これについては,MATLABとの間のインターフェースも自社で作っています. ――連成シミュレーションは,メカトロニクス機器の開発において,どのような問題を解決してくれるのでしょう. 梅田氏:従来のシミュレーションはどちらかというと,振る舞いを再現することで,制御面での対策を早めに行うことが目的でした.現在は,ハードウェア開発の信頼性向上を目的に,シミュレーションを行っています. 安川電機はロボットのイメージがあるかもしれませんが,サーボモータなどのコンポーネントを提供するメーカでもあります.サーボ・ドライバやサーボ・モータなどのコンポーネントを提供するメーカです.こうした製品は,顧客の要求に柔軟に対応できるコンポーネントに仕上げなくてはなりません.そこで,多様な条件でこれらをテストする必要があるわけですが,これらのすべてを実際のシステムを組んでテストすることは不可能です(図2).
|
|
 | |
|
|
Copyright 1997-2008 CQ Publishing Co.,Ltd.
|